Кривизна земной поверхности и неровности рельефа местности сильно ограничивают возможности наземных и корабельных ЗРК по обнаружению и поражению низколетящих средств воздушного нападения (СВН). Каким образом можно эффективно обеспечить возможность стрельбы ЗРК по низколетящим целям?
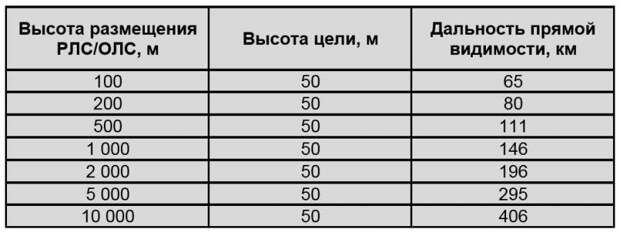
Один из вариантов – размещение РЛС на подъёмно-мачтовом устройстве (ПМУ). Если мы разместим РЛС на высоте 15 метров, то дальность видимости летательного аппарата (ЛА), движущегося на высоте 50 метров над поверхностью составит 41 км. Увеличение высоты ПМУ до 50 метров увеличит теоретическую дальность видимости всего на 13 км (до 54 км), при этом сложность и громоздкость такого оборудования будет расти в гораздо большей степени.
Казалось бы, вполне нормально для ЗРК малой дальности типа «Панцирь-СМ»? Но на практике неровности рельефа местности, лесные массивы, здания и другие естественные и искусственные препятствия снизят эту величину в несколько раз.
На какую минимальную высоту необходимо поднять РЛС для того, чтобы обеспечить обнаружение низколетящих целей?
Высота, на которую необходимо поднять средства обнаружения для компенсации неровностей рельефа местности, может изменяться в каждом конкретном случае. В большинстве случаев перепад высот на равнинной территории России в пределах дальности 100-200 км составляет не более 100-200 метров. В горной местности перепад может быть существенно больше, и указать какое-либо конкретное значение затруднительно.
Условно для ЗРК малой дальности (до 40-50 км) можно принять высоту, необходимую для компенсации неровности рельефа местности в 100 метров, для ЗРК средней дальности (до 50-150 км) высота, необходимая для компенсации неровности рельефа местности составит 200 метров.
Таким образом, минимальная высота размещения РЛС, для обнаружения низколетящих целей, для ЗРК малой дальности составит около 200 метров, для ЗРК средней дальности, около 700 метров. Высота размещения РЛС для обеспечения загоризонтной работы ЗРК большой дальности должна быть сопоставима с высотой полёта самолётов ДРЛО, порядка 10 000 м, в этом случае рельеф местности играет существенно меньшее значение.
Указанные высоты делают применение ПМУ невозможным, но есть несколько других способов «заглянуть за горизонт».
Одним из таких способов является применение аэростатов. В США реализуется проект JLENS. В рамках данного проекта предусматривается размещение радиолокационных и оптических средств разведки на аэростатах, закреплённых в определённых точках страны, и предназначенных для обнаружения низколетящих крылатых ракет. Высота размещения аэростатов составляет 3 — 4,5 км, масса полезной нагрузки около трёх тонн. Дальность обнаружения воздушных целей должна составлять порядка 550 км, наземных целей порядка 225 км. Помимо обнаружения, аэростат JLENS должен обеспечивать загоризонтное целеуказание для ракет земля-воздух. Для удержания аэростата на позиции и обмена данными предполагается использовать трос, включающий в себя кабели электропитания и оптоволоконные кабели передачи данных в карбоновой оплётке.

В рамках рассматриваемой нами задачи, у данного проекта есть несколько недостатков: аэростат не очень удобен для постоянного перемещения автотранспортом, и по возможности должен быть привязан к определённой точке, что исключает возможность смены позиции мобильными ЗРК и является неприемлемым. Кроме того, огромные размеры аэростата (длина свыше 70 метров) теоретически могут препятствовать его работе в условиях сильного порывистого ветра.
С другой стороны, сама концепция является достаточно перспективной. Размещённые на аэростатах РЛС могут прикрыть от удара низколетящими СВН стационарные объекты, в первую очередь такие, как шахты межконтинентальных баллистических ракет (МБР), базы подводных лодок, носителей баллистических ракет, аэродромы стратегических бомбардировщиков, атомные электростанции и другие критичные элементы вооружённых сил и инфраструктуры страны.
Таким образом, несмотря на то, что аэростаты не являются оптимальным средством для обеспечения ЗРК возможностью поражения целей за линией горизонта, они могут сыграть важную роль в прикрытии особо важных стационарных объектов от внезапного удара низколетящими СВН противника. Их основным преимуществом является возможность квазинепрерывного нахождения в воздухе без значительных затрат топлива и электроэнергии.
В России такие аэростаты разрабатываются компанией «РосАэроСистемы». В частности, можно рассмотреть привязной аэростат большого объема «ПУМА». Аэростат Пума был разработан как носитель РЛС для круглосуточного радиолокационного наблюдение с высоты до 5 км в течение 30 дней без посадки.
Предполагаемый радиус обнаружения и сопровождения воздушных целей составит 300-350 км. Аэростат должен выдерживать ураганный ветер до 46 м/с и прямые попадания молнии. Аэростат удерживается кабелем-тросом во время подъема, спуска и стоянки на рабочей высоте, по нему же обеспечивается электроснабжение бортовых систем и полезного груза мощностью до 40 кВт, а также, отвод молний и статического электричества. Полезная нагрузка аэростата «ПУМА» составляет до 2250 кг.

Судя по всему, вооружёнными силами РФ это направление прорабатывается:
Дело за концерном «Алмаз-Антей», необходимо чтобы аэростаты и дирижабли могли не только предупреждать об угрозе воздушного нападения, но и наводить на выявленные цели зенитные управляемые ракеты (ЗУР), оснащённые активной радиолокационной головкой самонаведения (АРГСН).
Вернёмся к ЗРК. Для начала рассмотрим ЗРК малой и средней дальности, для которых требуется поднять РЛС на высоту соответственно 200 и 700 метров.
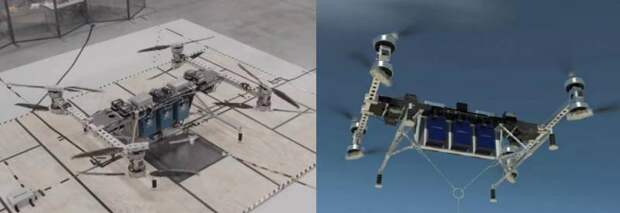
В начале 2018 года компания Boeing представила опытный образец электрического беспилотного грузового летательного аппарата-квадрокоптера. Этот БПЛА предназначен для испытаний и отладки технологий, необходимых для создания грузовых и пассажирских летательных аппаратов следующего поколения. Длина опытного БПЛА 4,57 метра, ширина 5,49 метра, высота 1,22 метра, вес, включая вес аккумуляторных батарей, составляет 339 килограмм. Полезная нагрузка — до 226 кг. Конструкция включает четыре электродвигателями с восемью роторами.
Забраться повыше
Один из вариантов – размещение РЛС на подъёмно-мачтовом устройстве (ПМУ). Если мы разместим РЛС на высоте 15 метров, то дальность видимости летательного аппарата (ЛА), движущегося на высоте 50 метров над поверхностью составит 41 км. Увеличение высоты ПМУ до 50 метров увеличит теоретическую дальность видимости всего на 13 км (до 54 км), при этом сложность и громоздкость такого оборудования будет расти в гораздо большей степени.
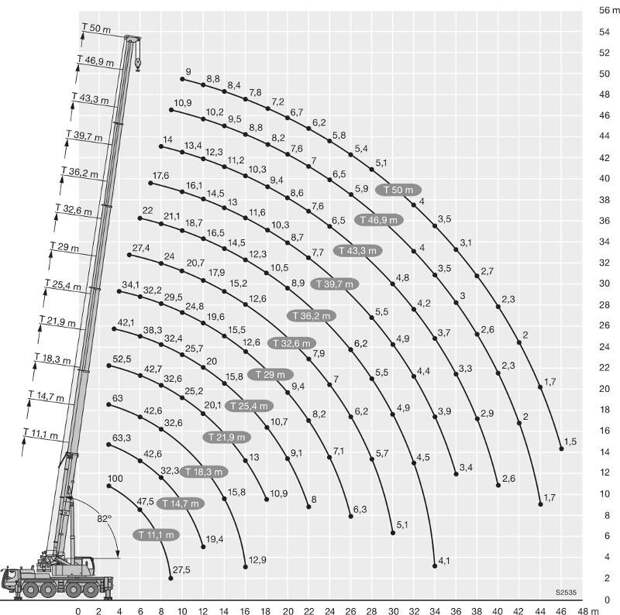
Возможности современных автокранов позволяют поднимать груз массой 9 тонн на высоту до 50 метров, что вполне позволяет разместить на ПМУ аналогичной конструкции РЛС для обнаружения низколетящих целей
Казалось бы, вполне нормально для ЗРК малой дальности типа «Панцирь-СМ»? Но на практике неровности рельефа местности, лесные массивы, здания и другие естественные и искусственные препятствия снизят эту величину в несколько раз.
На какую минимальную высоту необходимо поднять РЛС для того, чтобы обеспечить обнаружение низколетящих целей?
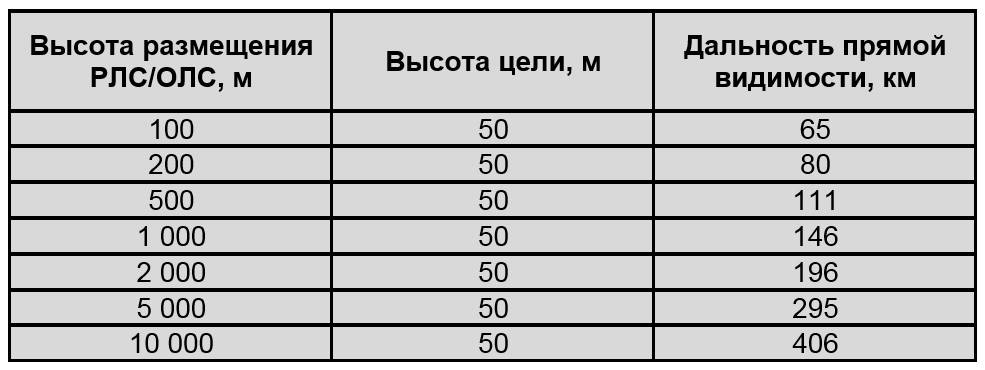
Дальность прямой видимости в зависимости от высоты размещения средств обнаружения, без учёта рельефа местности
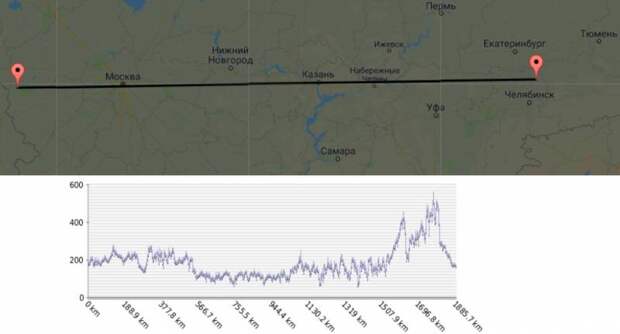
Высота, на которую необходимо поднять средства обнаружения для компенсации неровностей рельефа местности, может изменяться в каждом конкретном случае. В большинстве случаев перепад высот на равнинной территории России в пределах дальности 100-200 км составляет не более 100-200 метров. В горной местности перепад может быть существенно больше, и указать какое-либо конкретное значение затруднительно.
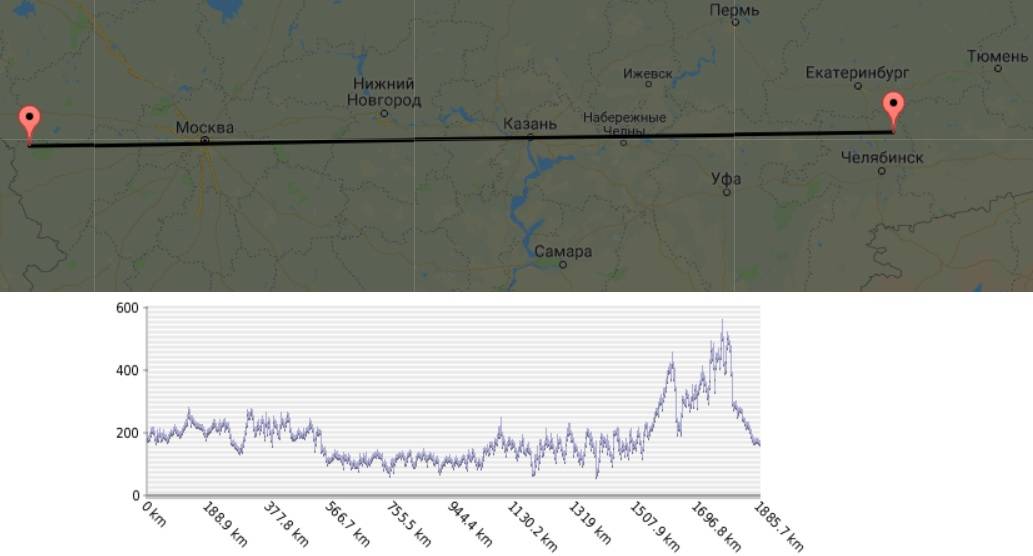
Профиль перепада высот
Условно для ЗРК малой дальности (до 40-50 км) можно принять высоту, необходимую для компенсации неровности рельефа местности в 100 метров, для ЗРК средней дальности (до 50-150 км) высота, необходимая для компенсации неровности рельефа местности составит 200 метров.
Таким образом, минимальная высота размещения РЛС, для обнаружения низколетящих целей, для ЗРК малой дальности составит около 200 метров, для ЗРК средней дальности, около 700 метров. Высота размещения РЛС для обеспечения загоризонтной работы ЗРК большой дальности должна быть сопоставима с высотой полёта самолётов ДРЛО, порядка 10 000 м, в этом случае рельеф местности играет существенно меньшее значение.
Указанные высоты делают применение ПМУ невозможным, но есть несколько других способов «заглянуть за горизонт».
РЛС на аэростате
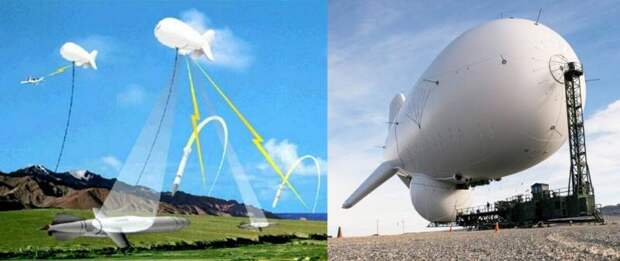
Одним из таких способов является применение аэростатов. В США реализуется проект JLENS. В рамках данного проекта предусматривается размещение радиолокационных и оптических средств разведки на аэростатах, закреплённых в определённых точках страны, и предназначенных для обнаружения низколетящих крылатых ракет. Высота размещения аэростатов составляет 3 — 4,5 км, масса полезной нагрузки около трёх тонн. Дальность обнаружения воздушных целей должна составлять порядка 550 км, наземных целей порядка 225 км. Помимо обнаружения, аэростат JLENS должен обеспечивать загоризонтное целеуказание для ракет земля-воздух. Для удержания аэростата на позиции и обмена данными предполагается использовать трос, включающий в себя кабели электропитания и оптоволоконные кабели передачи данных в карбоновой оплётке.
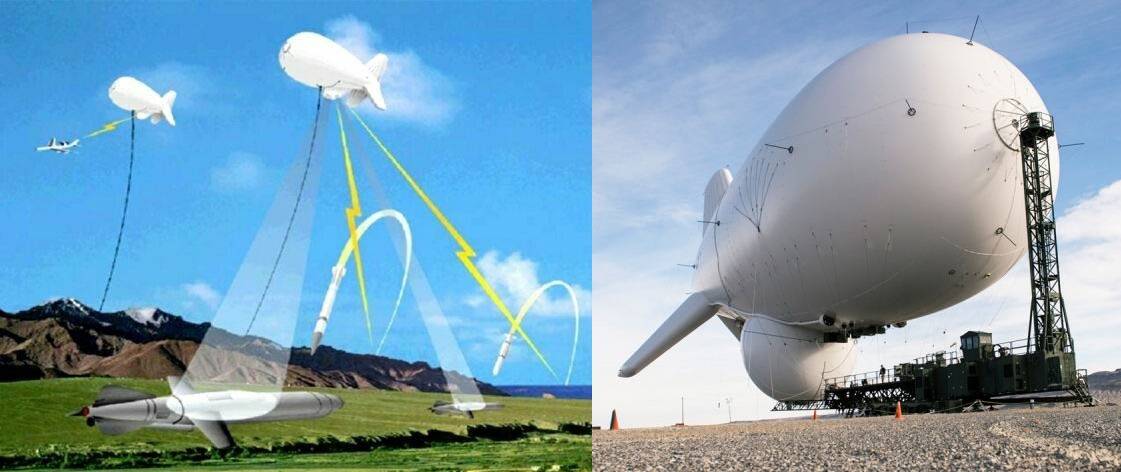
Принцип действия и сам аэростат проекта JLENS

Машина для плетения преформ из углеродного волокна, примерно также можно изготавливать оболочку для высокопрочных тросов
В рамках рассматриваемой нами задачи, у данного проекта есть несколько недостатков: аэростат не очень удобен для постоянного перемещения автотранспортом, и по возможности должен быть привязан к определённой точке, что исключает возможность смены позиции мобильными ЗРК и является неприемлемым. Кроме того, огромные размеры аэростата (длина свыше 70 метров) теоретически могут препятствовать его работе в условиях сильного порывистого ветра.
С другой стороны, сама концепция является достаточно перспективной. Размещённые на аэростатах РЛС могут прикрыть от удара низколетящими СВН стационарные объекты, в первую очередь такие, как шахты межконтинентальных баллистических ракет (МБР), базы подводных лодок, носителей баллистических ракет, аэродромы стратегических бомбардировщиков, атомные электростанции и другие критичные элементы вооружённых сил и инфраструктуры страны.
Таким образом, несмотря на то, что аэростаты не являются оптимальным средством для обеспечения ЗРК возможностью поражения целей за линией горизонта, они могут сыграть важную роль в прикрытии особо важных стационарных объектов от внезапного удара низколетящими СВН противника. Их основным преимуществом является возможность квазинепрерывного нахождения в воздухе без значительных затрат топлива и электроэнергии.
В России такие аэростаты разрабатываются компанией «РосАэроСистемы». В частности, можно рассмотреть привязной аэростат большого объема «ПУМА». Аэростат Пума был разработан как носитель РЛС для круглосуточного радиолокационного наблюдение с высоты до 5 км в течение 30 дней без посадки.
Предполагаемый радиус обнаружения и сопровождения воздушных целей составит 300-350 км. Аэростат должен выдерживать ураганный ветер до 46 м/с и прямые попадания молнии. Аэростат удерживается кабелем-тросом во время подъема, спуска и стоянки на рабочей высоте, по нему же обеспечивается электроснабжение бортовых систем и полезного груза мощностью до 40 кВт, а также, отвод молний и статического электричества. Полезная нагрузка аэростата «ПУМА» составляет до 2250 кг.
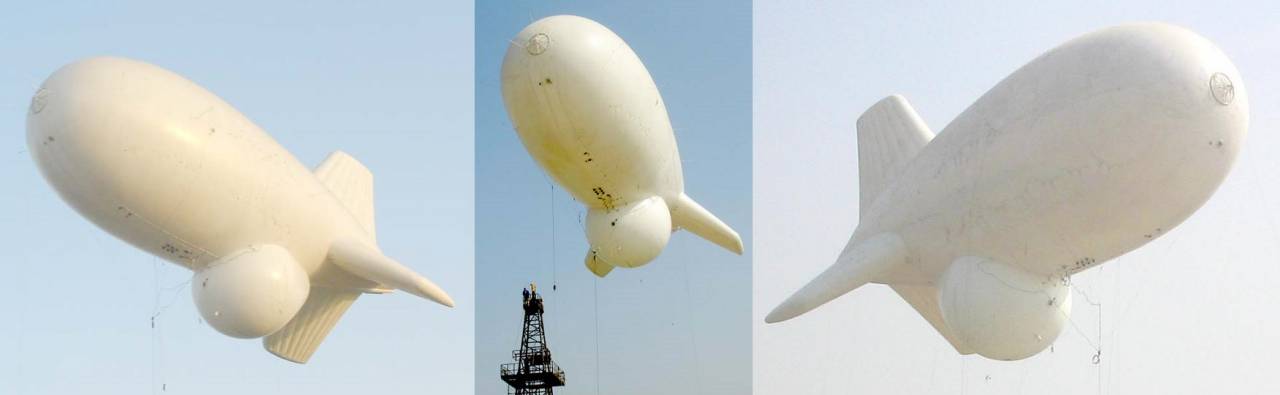
Привязной аэростат большого объема «ПУМА»
Судя по всему, вооружёнными силами РФ это направление прорабатывается:
В июле 2015 года советник первого заместителя генерального директора концерна "Радиоэлектронные технологии" (КРЭТ) Владимир Михеев рассказал РИА Новостио начале работ над проектом дирижабля для нужд противоракетной обороны страны. Он может стать полноценным элементом системы предупреждения о ракетном нападении (СПРН), которая на сегодняшний день состоит из двух эшелонов — орбитальной спутниковой группировки и наземных радиолокационных станций.
Дело за концерном «Алмаз-Антей», необходимо чтобы аэростаты и дирижабли могли не только предупреждать об угрозе воздушного нападения, но и наводить на выявленные цели зенитные управляемые ракеты (ЗУР), оснащённые активной радиолокационной головкой самонаведения (АРГСН).
Квадрокоптеры и другие беспилотные летательные аппараты (БПЛА) вертикального взлёта и посадки
Вернёмся к ЗРК. Для начала рассмотрим ЗРК малой и средней дальности, для которых требуется поднять РЛС на высоту соответственно 200 и 700 метров.
В начале 2018 года компания Boeing представила опытный образец электрического беспилотного грузового летательного аппарата-квадрокоптера. Этот БПЛА предназначен для испытаний и отладки технологий, необходимых для создания грузовых и пассажирских летательных аппаратов следующего поколения. Длина опытного БПЛА 4,57 метра, ширина 5,49 метра, высота 1,22 метра, вес, включая вес аккумуляторных батарей, составляет 339 килограмм. Полезная нагрузка — до 226 кг. Конструкция включает четыре электродвигателями с восемью роторами.
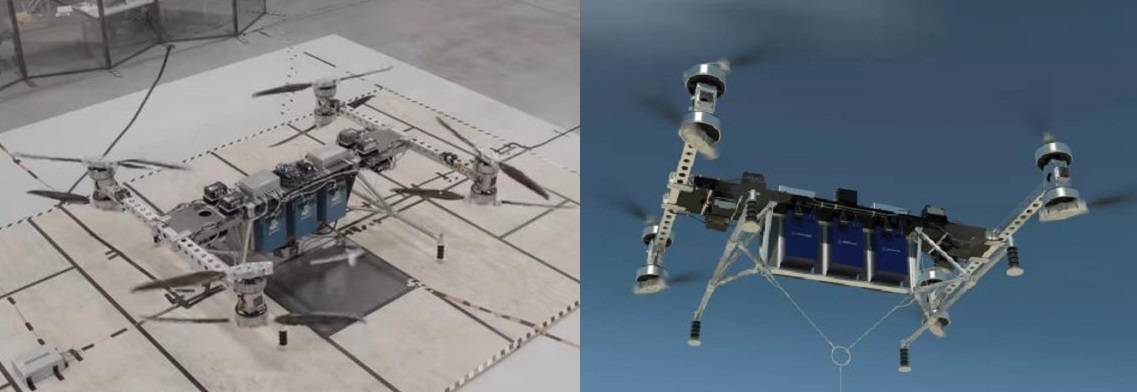
Грузовой квадрокоптер компании Boeing
Презентация грузового квадрокоптера компании Boeing
Электрические квадрокоптеры-БПЛА могут стать эффективным решением обнаружения низколетящих СВН для наземных и морских ЗРК.
Электрический квадрокоптер-БПЛА должен размещаться на машине носителе, там-же должна размещаться дизель-генераторная установка (ДГУ) для обеспечения БПЛА электроэнергией. К сожалению, на данный момент неизвестна мощность электродвигателей опытного квадрокоптера, время зарядки батарей и время полёта.
Могут быть рассмотрены два варианта:
— в первом варианте аккумуляторные батареи, необходимые для поддержания длительного полёта отсутствуют, электроснабжение осуществляется с машины носителя, имеется лишь небольшая резервная батарей для осуществления аварийной посадки БПЛА, предположительно, этот вариант можно считать оптимальным;
— второй вариант может быть применён, если масса кабеля, требующегося для подачи необходимой мощности на квадрокоптер, получиться слишком большой, в этом случае на квадрокоптере должны размещаться аккумуляторные батареи или суперконденсаторы (ионисторы) с функцией быстрой зарядки.
Для обеспечения непрерывности нахождения в воздухе на четыре ЗРК малой дальности необходимо как минимум две машины-носителя с БПЛА. Время нахождения БПЛА в воздухе будет ограничено лишь наличием топлива для ДГУ.
Вместо электрического квадрокоптера может быть реализован БПЛА на базе бензиновых или дизельных поршневых двигателей. В России разработкой и производством таких решений занимается компания SKYF Technology, предлагающая заказчику БПЛА вертикального взлёта и посадки SKYF. В настоящий момент грузоподъёмность БПЛА SKYF составляет 250 килограмм с перспективой увеличения до 400 килограмм. Высота полёта данного БПЛА до 3000 метров.

Бензиновый БПЛА вертикального взлёта и посадки
Демонстрация полёта БПЛА SKYF
Презентация БПЛА SKYF
Ранее компанией «Горизонт» был анонсирован БПЛА Горизонт Эйр S-100 вертолётного типа с РЛС кругового обзора, на базе австрийского Schiebel Camcopter S-100. Смонтированная на данном БПЛА РЛС кругового обзора «Колибри», установленная в нижней части фюзеляжа, разрабатывается совместно с московским «НИИ радиофизики». Суммарная масса оборудования РЛС должна составить не более 6,5 кг, требуемая дальность в режиме кругового обзора (зависание БЛА) не менее 200 км, в режиме синтезированной апертуры не менее 20 км.
Полезная нагрузка данного БПЛА слишком мала (35 кг), для того, чтобы разместить РЛС с приемлемыми характеристиками, ко в качестве концепта он может быть интересен. Время непрерывного нахождения в воздухе 6 часов.

БПЛА вертолётного типа компании «Горизонт» с РЛС кругового обзора
Приведённые примеры квадрокоптеров-БПЛА прямо не могут быть задействованы для размещения РЛС, поскольку обладают относительно скромной полезной нагрузкой, но нет сомнений, что их конструкции будут активно развиваться и совершенствоваться. В первую очередь это относиться в электрическим квадрокоптерам-БПЛА.
Основными требованиями к БПЛА ДРЛО типа квадрокоптер или БПЛА-ДРЛО вертолётного типа должны стать высокая надёжность и возможность долговременного нахождения в воздухе, с обеспечением заданных лётно-технических характеристик (ЛТХ), а также высокий эксплуатационный ресурс и низкая стоимость лётного часа.
Высотные БПЛА
Для ЗРК большой дальности БПЛА вертикального взлёта и посадки уже не будет эффективным и достаточным средством разведки, поскольку высота размещения РЛС, для достижения дальности обзора порядка 400 км, должна превышать 10 000 метров.
Предположительно в качестве летающей РЛС для ЗРК большого радиуса действия могут быть использованы БПЛА большой продолжительности полёта, самолётного типа, средней или большой размерности.
Одним из кандидатов на роль перспективного беспилотника-ДРЛО может стать БПЛА Альтаир взлётной массой 5 тонн и полезной нагрузкой 1-2 тонны. Данный БПЛА создаётся в рамках НИР «Альтиус-М» в ОКБ «Сокол» (г.Казань) совместно с компанией «Транзас». Продолжительность его полёта должна составлять до 48 часов, дальность полёта 10 000 км. В 2018 году программа БПЛА Альтаир была передана АО «Уральский завод гражданской авиации» (УЗГА). Лётные испытания БПЛА Альтаир должны начаться в 2019 году.

Прототип БПЛА Альтаир
Аппараты подобного типа разрабатываются и в других странах. В частности, китайская компания CETC разрабатывает БПЛА JY-300. Аппарат средней размерности должен стать носителем конформных антенн и служить беспилотным средством ДРЛО. По предварительным данным БПЛА JY-300 имеет взлетную массу около 1300 кг и может нести 400 кг полезной нагрузки. Он способен выполнять полеты продолжительностью до 12 часов, на высотах до 7,6 км. Встроенные в конструкцию данного беспилотника РЛС должны позволить выполнять обнаружение воздушных и морских целей на больших расстояниях.

Прототип БПЛА ДРЛО JY-300 китайской компания CETC
Российские БПЛА средней и большой размерности преследует множество проблем, включая отсутствие компактных, мощных и экономичных отечественных двигателей, отсутствие современной авионики. Одной из важнейших проблем является отсутствие высокоскоростных каналов спутниковой передачи данных с глобальной досягаемостью, позволяющих обеспечить управление БПЛА и получение от него разведывательной информации на большом удалении от пункта базирования.
Применение БПЛА ДРЛО с большой продолжительностью полёта не требует обязательного наличия таких каналов. В общих чертах работа связки ЗРК большой дальности – БПЛА большой продолжительности полёта может выглядеть так:
БПЛА ДРЛО большой продолжительности полёта осуществляет взлёт с аэродрома и выходит в зону патрулирования над позициями эшелонированной ПВО. Вся информация с него поступает операторам ЗРК большой дальности, и далее, через пункт боевого управления операторам других ЗРК, входящих в объединённую эшелонированную ПВО. Полёт БПЛА должен осуществляться по большей части в автоматическом режиме по заданной траектории. К одному ЗРК большой дальности должны относиться два БПЛА ДРЛО. В этом случае, они могут осуществлять посменно боевое дежурство над позициями ЗРК продолжительностью по 36-48 часов, в зависимости от удалённости аэродрома базирования.
Требования к БПЛА ДРЛО большой продолжительности полёта такие же, как и к БПЛА для ЗРК малой и средней дальности – высокий эксплуатационный ресурс и низкая стоимость лётного часа.
Может возникнуть вопрос: в заглавии статьи говорится о работе ЗРК по низколетящим целям без привлечения авиации ВВС, а БПЛА большой продолжительности полёта явно относятся к авиации. Здесь вопрос скорее в ведомственной принадлежности. В США, по соглашению Джонсона-МакКонелла между армией и ВВС, вертолёты не относятся к ВВС и подчиняются напрямую армии США, действуют в её интересах (о разделении летательных аппаратов в США между армией и ВВС хорошо написано здесь). Так и нашем случае, то, что БПЛА относится к конкретному ЗРК не позволит использовать его ВВС для других целей.
Эшелонированная ПВО с БПЛА ДРЛО
Применение БПЛА ДРЛО квадрокоптерного типа и БПЛА ДРЛО большой продолжительности полёта позволит создать плотное радиолокационное покрытие местности и обеспечить выдачу целеуказания ракетам с АРГСН и ИК ГСН на максимальной дальности.
Предположительно на два ЗРК малой дальности должна приходиться одна машина с БПЛА ДРЛО квадрокоптерного типа или две машины на четыре ЗРК. В состав ЗРК средней дальности должны входить две машины с БПЛА ДРЛО квадрокоптерного типа. Два БПЛА ДРЛО большой продолжительности полёта должны относиться к ЗРК большой дальности.
В угрожаемый период или в случае начала боевых действий, БПЛА большой продолжительности полёта должны осуществлять непрерывное патрулирование над позициями ЗРК. БПЛА квадрокоптерного типа, из состава ЗРК малой и средней дальности, должны находиться на машинах носителях в готовности к немедленному старту. В случае обнаружения воздушной угрозы запуск БПЛА квадрокоптерного типа должен осуществляться в течении нескольких минут.
Стоимость самих БПЛА и времени их полёта традиционно существенно ниже стоимости пилотируемых самолётов и вертолётов, что делает эту задачу экономически привлекательной. Технически предлагаемая концепция также не содержит непреодолимых проблем.
Для стационарных объектов высокой важности могут применяться аэростаты ДРЛО. В случае обеспечения ПВО объектов, оборудованных аэростатами ДРЛО, БПЛА большой продолжительности полёта не требуются и могут быть исключены из состава ЗРК большой дальности или могут находиться на аэродроме в готовности к вылету как резервное средство разведки и целеуказания.
БПЛА ДРЛО для флота
Ранее рассматривалось только применение БПЛА ДРЛО в интересах наземных ЗРК. Но не менее, а возможно и более важной задачей является применение БПЛА ДРЛО квадрокоптерного типа и БПЛА с большой продолжительностью полёта в интересах ПВО кораблей военно-морского флота (ВМФ). Учитывая фактическое отсутствие у нас авианосцев и, соответственно, самолётов ДРЛО на них, современные российские корабли слабо защищены от атак с воздуха, вне зависимости от того, какое бы ПВО на них ни стояло, из-за физических ограничений по дальности обнаружения низколетящих целей.
Применение БПЛА квадрокоптерного типа на кораблях ВМФ России позволит существенно отодвинуть границу поражения низколетящих целей. А отправка БПЛА с большой продолжительностью и дальностью полёта в район нахождения кораблей ВМФ придаст им дополнительные возможности по разведке сил противника и выдаче целеуказания ракетному оружию большой дальности.

Концепт британского корабля Dreadnought 2050 с БПЛА, соединённого с кораблём тросом из углеродных нанотрубок и сверхпроводящим кабелем с криогенным охлаждением
Нельзя исключать применение аэростатов и дирижаблей ДРЛО в интересах ВМФ, тем более что исторические примеры применения аэростатов флотом России есть.
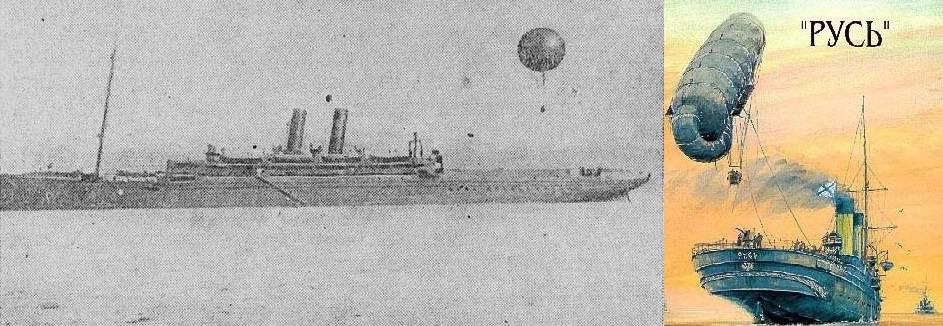
Крейсер «Русь» с привязанным аэростатом
Выводы
Наземная и надводная ПВО без возможности атаки низколетящих целей на большом удалении будет разгромлена.
Для решения этой задачи в интересах ЗРК малой и средней дальности необходимо создание БПЛА ДРЛО квадрокоптерного типа, предпочтительно с электропитанием по кабелю от машины носителя.
Для ЗРК большой дальности необходимо активизировать разработку БПЛА ДРЛО большой продолжительности полёта.
Для стационарных объектов высокой важности могут применяться аэростаты ДРЛО.
Все вышеперечисленных системы (БПЛА ДРЛО квадрокоптерного типа, БПЛА ДРЛО большой продолжительности полёта и аэростаты ДРЛО) имеют большое значение для повышения эффективности работы и выживаемости не только наземных комплексов ПВО, но кораблей ВМФ России.
- Автор:
- Андрей Митрофанов
- Использованы фотографии:
- ria.ru, rosaerosystems.ru, planetcalc.ru, vhfdx.ru, aviation-gb7.ru, artek-braiding.ru, topwar.ru, ВПК.name, skyf.pro, gorizontrostov.ru
- Статьи из этой серии:
- Статьи из этой серии:
Прорыв ПВО превышением её возможностей по перехвату целей: пути решения
Взаимодействие наземных ЗРК и самолётов ВВС
Свежие комментарии