В предыдущих статьях мы рассмотрели способы повышения ситуационной осведомлённости экипажей бронемашин и необходимость повышения скорости наведения вооружения и средств разведки. Не менее важным моментом является обеспечение эффективного интуитивного взаимодействия членов экипажа с вооружением, датчиками и другими техническими системами боевых машин.

В настоящий момент рабочие места членов экипажа являются узкоспециализированными – отдельное место водителя, отдельные рабочие места командира и наводчика. Изначально это было обусловлено компоновкой бронемашин, включающей вращающуюся башню и оптические приборы наблюдения. Все члены экипажа имели доступ только к своим органам управления и приборам наблюдения, не имея возможности выполнять функции другого члена экипажа.
Подобная ситуация ранее наблюдалась и в авиации, в качестве примера можно привести рабочие места пилота и штурмана-оператора истребителя-перехватчика МИГ-31 или боевого вертолёта Ми-28Н. При такой компоновке рабочего пространства гибель или ранение одного из членов экипажа делает выполнение боевой задачи невозможным, даже сам процесс возврата на базу становился затруднительным.

В настоящее время разработчики стараются унифицировать рабочие места экипажа. В значительной степени этому способствовало появление многофункциональных дисплеев, на которые может быть выведена любая необходимая информация, с любых имеющихся на борту средств разведки.
Унифицированные рабочие места пилота и штурмана-оператора разрабатывались в рамках создания разведывательно-ударного вертолёта Boeing/Sikorsky RAH-66 Comanche. Помимо этого, пилоты вертолёта RAH-66 должны были получить возможность управления большинством функций боевой машины без отрыва рук от органов управления. В вертолёте RAH-66 планировалось установить нашлемную объединенную прицельную систему фирмы Kaiser-Electronics, способную выводить на нашлемный дисплей инфракрасное (ИК) и телевизионное изображение местности от систем обзора передней полусферы или трехмерную цифровую карту местности, реализуя принцип «глаза вне кабины». Наличие нашлемного дисплея позволяет пилотировать вертолёт, а оператору вооружения осуществлять поиск целей, не опуская взгляд на приборную доску.

Программа вертолёта RAH-66 была закрыта, однако можно не сомневаться, что полученные в ходе её реализации наработки используются в других программах по созданию перспективных боевых машин. В России унифицированные рабочие места пилота и штурмана-оператора реализованы в боевом вертолёте Ми-28НМ на базе опыта, полученного при создании учебно-боевого вертолёта Ми-28УБ. Также для Ми-28НМ разрабатывается шлем пилота с выводом изображения на лицевой щиток и нашлемной системой целеуказания, о котором мы говорили в предыдущей статье.
Появление шлемов с возможностью вывода информации, безэкипажных башен и дистанционно-управляемых модулей вооружения (ДУМВ) позволит унифицировать рабочие места и в наземных боевых машинах. С высокой вероятностью в перспективе могут быть унифицированы рабочие места всех членов экипажа, включая водителя. Современные системы управления не требуют механической связи между органами управления и исполнительными устройствами, поэтому для вождения бронемашины может применяться компактный штурвал или даже боковая малоходовая ручка управления – высокоточный джойстик.

По неподтверждённым данным, возможность применения джойстика в качестве замены штурвалу или рычагам управления рассматривалась с 2013 года при разработке системы управления танком Т-90МС. Также по образу геймпада игровой приставки «Sony Playstation» предположительно выполнен пульт управления боевой машины пехоты (БМП) «Курганец», однако не раскрывается, предназначен этот пульт для управления движением БМП, или только для управления вооружением.
Таким образом, для управления движением перспективных боевых машин может быть рассмотрен вариант с использованием боковой малоходовой ручки управления, а если это вариант будет признан неприемлемым, то штурвала, убирающегося в неактивном состоянии. По умолчанию органы управления движением боевой машины должны быть активны у механика-водителя, но при необходимости любой член экипажа должен иметь возможность его заменить. Основным правилом при проектировании элементов управления боевыми машинами должен стать принцип – «руки всегда на органах управления».
Унифицированные рабочие места членов экипажа должны располагаться в бронированной капсуле, изолированной от других отсеков боевой машины, как это реализовано в проекте «Армата».
Кресла с изменяемым углом наклона, закреплённые на амортизаторах, должны обеспечивать снижение воздействий от вибраций и тряски при движении по пересечённой местности. В перспективе для устранения вибраций и тряски могут применяться активные амортизаторы. В креслах экипажа может быть предусмотрена вентиляция, интегрированная с многозонным климат контролем.
Может показаться, что такие требования являются избыточными, поскольку танк – это не лимузин, а боевая машина. Но реальность такова, что время армий, укомплектованных необученными новобранцами безвозвратно ушло. Рост сложности и стоимости боевых машин требует привлечения соответствующих им профессионалов, которым необходимо обеспечить комфортабельное рабочее место. С учётом стоимости бронетехники, составляющей порядка пяти — десяти миллионов долларов за единицу, установка оборудования, повышающего комфорт экипажа, не сильно повлияет на итоговую сумму. В свою очередь, нормальные условия работы будут способствовать повышению эффективности действий экипажа, которому не надо отвлекаться на бытовые неудобства.
Одним из наиболее сложных вопросов автоматизации является обеспечение эффективного взаимодействия человека и техники. Именно на этом участке могут быть значительные задержки в цикле НОРД (Наблюдение, Ориентация, Решение, Действие) на стадиях «ориентация» и «решение». Для понимания ситуации (ориентация) и принятия эффективных решений (решение) информация для экипажа должна выводиться в максимально доступной и интуитивно понятной форме. С увеличением вычислительной мощности аппаратных средств и появлением программного обеспечения (ПО), использующего в том числе технологии анализа информации на основе нейросетей, часть задач по обработке разведывательных данных, ранее выполняемых человеком, может быть возложена на программно-аппаратные комплексы.
Например, при атаке ПТУР бортовой компьютер бронемашины может самостоятельно проанализировать изображение с тепловизора и камер, работающих в ультрафиолетовом (УФ) диапазоне (след двигателя ракеты), данные с РЛС, а возможно и с акустических датчиков, обнаружить и захватить пусковую ПТРК, выбрать необходимый боеприпас и оповестить об этом экипаж, после чего, поражение расчёта ПТРК может быть произведено в автоматическом режиме, одной-двумя командами (разворот вооружения, выстрел).

Бортовая электроника перспективной бронетехники должна уметь самостоятельно определять потенциальные цели по их тепловой, УФ, оптической и радиолокационной сигнатуре, строить расчёт траектории движения, ранжировать цели по степени угрозы и выводить информацию на экран или в шлем в удобной для восприятия форме. Недостаточная или наоборот избыточная информация может привести к задержкам в принятии решения или к принятию ошибочных решений на стадиях «ориентация» и «решение».
Обнаружение бойца в камуфляже в УФ диапазоне
Важным подспорьем в работе экипажей бронемашин может стать микширование информации, поступающей от различных датчиков, и выводимой на одном экране/слое. Иными словами, информация от каждого средства наблюдения, размещённого на бронемашине, должна использоваться для формирования единого изображения, максимально удобного для восприятия. Например, в дневное время в качестве основы для построения картинки используется видеоизображение с цветных телекамер высокого разрешения. Изображение с тепловизора используется как вспомогательное для выделения теплоконтрастных элементов. Также дополнительные элементы изображения выводятся по данным с РЛС или УФ-камер. В ночное время основой для построения картинки становится видеоизображение с приборов ночного видения, которое соответственно дополняется информацией с других сенсоров.
Подобные технологии используются в настоящее время даже в смартфонах с несколькими камерами, например, когда чёрно-белая матрица, обладающая более высокой светочувствительностью, применяется для повышения качества изображения, получаемого цветной камерой. Применяются технологии совмещения изображения и в промышленных целях. Разумеется, возможность просмотра изображения с каждого средства наблюдения по отдельности должна оставаться как опция.
При действии бронетехники в группе, вывод информации может осуществляться с учётом данных, полученных сенсорами соседних бронемашин по принципу «видит один – видят все». Информация со всех сенсоров, размещённых на разведывательных и боевых единицах на поле боя, должна выводиться на верхний уровень, обрабатываться и предоставляться вышестоящему командованию в оптимизированном для каждого конкретного уровня принятия решений виде, что позволит обеспечить высокоэффективное управление войсками.
Можно предположить, что в перспективных боевых машинах стоимость создания программного обеспечения будет составлять большую часть стоимости разработки комплекса. И именно программное обеспечение во многом будет определять преимущества одной боевой машиной над другой.
Вывод изображения в цифровом виде позволит осуществлять обучение экипажей бронетехники без использования специализированных тренажёров, непосредственно в самой боевой машине. Безусловно, такое обучение не заменит полноценные тренировки с отстрелом реального вооружения, но всё же позволит значительно упростить подготовку экипажей. Обучение может производиться как индивидуально, когда экипаж бронемашины действует против ИИ (искусственный интеллект – боты в компьютерной программе), так и путём задействования большого числа боевых единиц различного типа в рамках одного виртуального поля боя. В случае проведения войсковых учений реальное поле боя может дополняться виртуальными объектами, с использованием в программном обеспечении бронемашин технологии дополненной реальности.


Огромная популярность онлайн симуляторов боевой техники позволяет предположить, что обучающее программное обеспечение перспективной бронетехники, адаптированное для применения на обычных компьютерах, может быть использовано для предварительной подготовки в игровой форме будущих потенциальных военнослужащих. Разумеется, в таком ПО должны быть внесены изменения, обеспечивающие сокрытие сведений, составляющих государственную и военную тайну.
Применение симуляторов в качестве средства повышения привлекательности военной службы постепенно становиться популярным инструментом в вооружённых силах стран мира. По некоторым сведениям военно-морские силы США использовали компьютерную игру-симулятор морских сражений Harpoon для обучения офицеров флота ещё в конце XX века. С тех пор возможности по созданию реалистичного виртуального пространства выросли многократно, при этом применение современных боевых машин зачастую всё более становится похожим на компьютерную игру, особенно когда речь идёт о беспилотной (дистанционно управляемой) боевой технике.
Экипажи перспективной бронетехники смогут принимать правильные решения в сложной, динамично меняющейся обстановке, и осуществлять их реализацию с существенно более высокой скоростью, чем это возможно в существующих боевых машинах. Этому будут способствовать унифицированные эргономичные рабочие места экипажа и применение интеллектуальных систем обработки и отображения информации. Использование бронетехники в качестве тренажёра позволит сэкономить финансовые средства на разработке и закупке специализированных обучающих средств, обеспечит всем экипажам возможность тренировки в любое время в виртуальном боевом пространстве или в ходе войсковых учений с использованием технологий дополненной реальности.
Можно предположить, что реализация вышеуказанных решений в части повышения ситуационной осведомлённости, оптимизации эргономики кабин экипажа и применение высокоскоростных приводов наведения позволят отказаться от одного из членов экипажа без потери боевой эффективности, например, можно совместить должность командира и наводчика. Однако на командира бронемашины могут быть возложены некоторые другие перспективные задачи, о которых мы поговорим в следующем материале.

Рабочие места пилота (слева) и штурмана-оператора (справа) в кабине истребителя-перехватчика МИГ-31
Рабочие места экипажей бронетехники
В настоящий момент рабочие места членов экипажа являются узкоспециализированными – отдельное место водителя, отдельные рабочие места командира и наводчика. Изначально это было обусловлено компоновкой бронемашин, включающей вращающуюся башню и оптические приборы наблюдения. Все члены экипажа имели доступ только к своим органам управления и приборам наблюдения, не имея возможности выполнять функции другого члена экипажа.
Подобная ситуация ранее наблюдалась и в авиации, в качестве примера можно привести рабочие места пилота и штурмана-оператора истребителя-перехватчика МИГ-31 или боевого вертолёта Ми-28Н. При такой компоновке рабочего пространства гибель или ранение одного из членов экипажа делает выполнение боевой задачи невозможным, даже сам процесс возврата на базу становился затруднительным.

Рабочие места пилота (слева) и штурмана-оператора (справа) в кабине боевого вертолёта Ми-28Н
В настоящее время разработчики стараются унифицировать рабочие места экипажа. В значительной степени этому способствовало появление многофункциональных дисплеев, на которые может быть выведена любая необходимая информация, с любых имеющихся на борту средств разведки.
Унифицированные рабочие места пилота и штурмана-оператора разрабатывались в рамках создания разведывательно-ударного вертолёта Boeing/Sikorsky RAH-66 Comanche. Помимо этого, пилоты вертолёта RAH-66 должны были получить возможность управления большинством функций боевой машины без отрыва рук от органов управления. В вертолёте RAH-66 планировалось установить нашлемную объединенную прицельную систему фирмы Kaiser-Electronics, способную выводить на нашлемный дисплей инфракрасное (ИК) и телевизионное изображение местности от систем обзора передней полусферы или трехмерную цифровую карту местности, реализуя принцип «глаза вне кабины». Наличие нашлемного дисплея позволяет пилотировать вертолёт, а оператору вооружения осуществлять поиск целей, не опуская взгляд на приборную доску.

Кабина разведывательно-ударного вертолёта Boeing/Sikorsky RAH-66 Comanche
Программа вертолёта RAH-66 была закрыта, однако можно не сомневаться, что полученные в ходе её реализации наработки используются в других программах по созданию перспективных боевых машин. В России унифицированные рабочие места пилота и штурмана-оператора реализованы в боевом вертолёте Ми-28НМ на базе опыта, полученного при создании учебно-боевого вертолёта Ми-28УБ. Также для Ми-28НМ разрабатывается шлем пилота с выводом изображения на лицевой щиток и нашлемной системой целеуказания, о котором мы говорили в предыдущей статье.
Появление шлемов с возможностью вывода информации, безэкипажных башен и дистанционно-управляемых модулей вооружения (ДУМВ) позволит унифицировать рабочие места и в наземных боевых машинах. С высокой вероятностью в перспективе могут быть унифицированы рабочие места всех членов экипажа, включая водителя. Современные системы управления не требуют механической связи между органами управления и исполнительными устройствами, поэтому для вождения бронемашины может применяться компактный штурвал или даже боковая малоходовая ручка управления – высокоточный джойстик.

Боковая малоходовая ручка управления в кабинах самолётов F-22 и F-35
По неподтверждённым данным, возможность применения джойстика в качестве замены штурвалу или рычагам управления рассматривалась с 2013 года при разработке системы управления танком Т-90МС. Также по образу геймпада игровой приставки «Sony Playstation» предположительно выполнен пульт управления боевой машины пехоты (БМП) «Курганец», однако не раскрывается, предназначен этот пульт для управления движением БМП, или только для управления вооружением.
Таким образом, для управления движением перспективных боевых машин может быть рассмотрен вариант с использованием боковой малоходовой ручки управления, а если это вариант будет признан неприемлемым, то штурвала, убирающегося в неактивном состоянии. По умолчанию органы управления движением боевой машины должны быть активны у механика-водителя, но при необходимости любой член экипажа должен иметь возможность его заменить. Основным правилом при проектировании элементов управления боевыми машинами должен стать принцип – «руки всегда на органах управления».
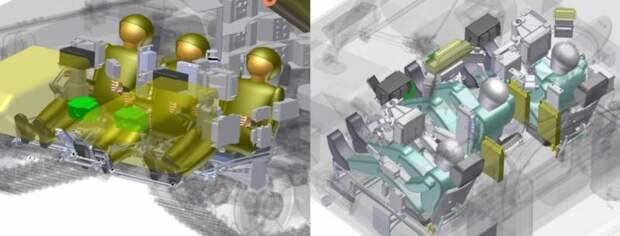
Унифицированные рабочие места членов экипажа должны располагаться в бронированной капсуле, изолированной от других отсеков боевой машины, как это реализовано в проекте «Армата».
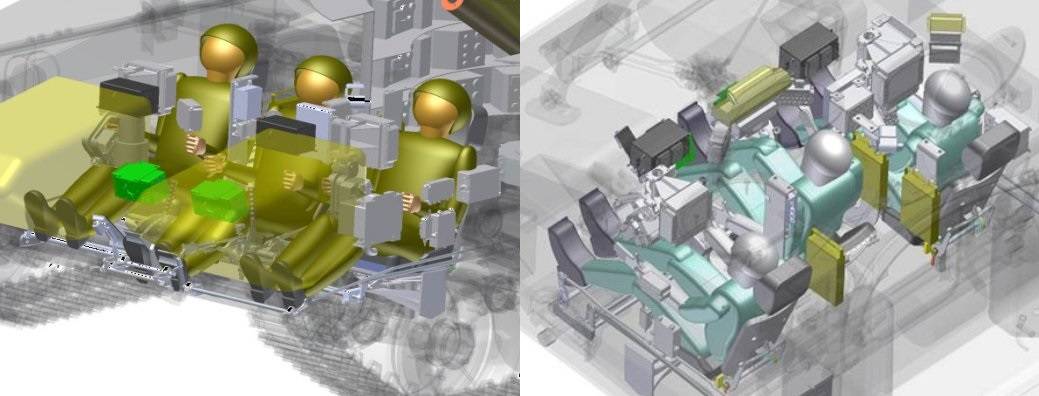
Расположение экипажа в проекте «Армата»
Кресла с изменяемым углом наклона, закреплённые на амортизаторах, должны обеспечивать снижение воздействий от вибраций и тряски при движении по пересечённой местности. В перспективе для устранения вибраций и тряски могут применяться активные амортизаторы. В креслах экипажа может быть предусмотрена вентиляция, интегрированная с многозонным климат контролем.
Может показаться, что такие требования являются избыточными, поскольку танк – это не лимузин, а боевая машина. Но реальность такова, что время армий, укомплектованных необученными новобранцами безвозвратно ушло. Рост сложности и стоимости боевых машин требует привлечения соответствующих им профессионалов, которым необходимо обеспечить комфортабельное рабочее место. С учётом стоимости бронетехники, составляющей порядка пяти — десяти миллионов долларов за единицу, установка оборудования, повышающего комфорт экипажа, не сильно повлияет на итоговую сумму. В свою очередь, нормальные условия работы будут способствовать повышению эффективности действий экипажа, которому не надо отвлекаться на бытовые неудобства.
Ориентация и решение
Одним из наиболее сложных вопросов автоматизации является обеспечение эффективного взаимодействия человека и техники. Именно на этом участке могут быть значительные задержки в цикле НОРД (Наблюдение, Ориентация, Решение, Действие) на стадиях «ориентация» и «решение». Для понимания ситуации (ориентация) и принятия эффективных решений (решение) информация для экипажа должна выводиться в максимально доступной и интуитивно понятной форме. С увеличением вычислительной мощности аппаратных средств и появлением программного обеспечения (ПО), использующего в том числе технологии анализа информации на основе нейросетей, часть задач по обработке разведывательных данных, ранее выполняемых человеком, может быть возложена на программно-аппаратные комплексы.
Например, при атаке ПТУР бортовой компьютер бронемашины может самостоятельно проанализировать изображение с тепловизора и камер, работающих в ультрафиолетовом (УФ) диапазоне (след двигателя ракеты), данные с РЛС, а возможно и с акустических датчиков, обнаружить и захватить пусковую ПТРК, выбрать необходимый боеприпас и оповестить об этом экипаж, после чего, поражение расчёта ПТРК может быть произведено в автоматическом режиме, одной-двумя командами (разворот вооружения, выстрел).

Всеракурсная система обзора в ультрафиолетовом спектре из состава комплекса 101КС "Атолл" самолёта Су-57 и мультиспектральная видеокамера Microvista Intevac с диапазоном видимости 150—1100 нм
Бортовая электроника перспективной бронетехники должна уметь самостоятельно определять потенциальные цели по их тепловой, УФ, оптической и радиолокационной сигнатуре, строить расчёт траектории движения, ранжировать цели по степени угрозы и выводить информацию на экран или в шлем в удобной для восприятия форме. Недостаточная или наоборот избыточная информация может привести к задержкам в принятии решения или к принятию ошибочных решений на стадиях «ориентация» и «решение».
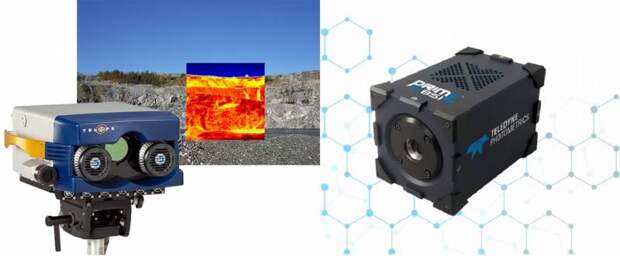
Гиперспектральная ИК-камера Telops Hyperspectral IR и высокочувствительная ультрафиолетовая sCMOS камера Prime BSI
Обнаружение бойца в камуфляже в УФ диапазоне
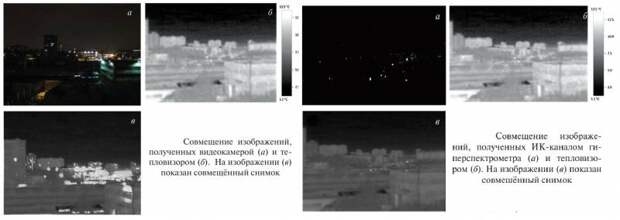
Важным подспорьем в работе экипажей бронемашин может стать микширование информации, поступающей от различных датчиков, и выводимой на одном экране/слое. Иными словами, информация от каждого средства наблюдения, размещённого на бронемашине, должна использоваться для формирования единого изображения, максимально удобного для восприятия. Например, в дневное время в качестве основы для построения картинки используется видеоизображение с цветных телекамер высокого разрешения. Изображение с тепловизора используется как вспомогательное для выделения теплоконтрастных элементов. Также дополнительные элементы изображения выводятся по данным с РЛС или УФ-камер. В ночное время основой для построения картинки становится видеоизображение с приборов ночного видения, которое соответственно дополняется информацией с других сенсоров.

Совмещение изображения, полученного от различных промышленных сенсоров
Подобные технологии используются в настоящее время даже в смартфонах с несколькими камерами, например, когда чёрно-белая матрица, обладающая более высокой светочувствительностью, применяется для повышения качества изображения, получаемого цветной камерой. Применяются технологии совмещения изображения и в промышленных целях. Разумеется, возможность просмотра изображения с каждого средства наблюдения по отдельности должна оставаться как опция.
При действии бронетехники в группе, вывод информации может осуществляться с учётом данных, полученных сенсорами соседних бронемашин по принципу «видит один – видят все». Информация со всех сенсоров, размещённых на разведывательных и боевых единицах на поле боя, должна выводиться на верхний уровень, обрабатываться и предоставляться вышестоящему командованию в оптимизированном для каждого конкретного уровня принятия решений виде, что позволит обеспечить высокоэффективное управление войсками.
Можно предположить, что в перспективных боевых машинах стоимость создания программного обеспечения будет составлять большую часть стоимости разработки комплекса. И именно программное обеспечение во многом будет определять преимущества одной боевой машиной над другой.
Обучение
Вывод изображения в цифровом виде позволит осуществлять обучение экипажей бронетехники без использования специализированных тренажёров, непосредственно в самой боевой машине. Безусловно, такое обучение не заменит полноценные тренировки с отстрелом реального вооружения, но всё же позволит значительно упростить подготовку экипажей. Обучение может производиться как индивидуально, когда экипаж бронемашины действует против ИИ (искусственный интеллект – боты в компьютерной программе), так и путём задействования большого числа боевых единиц различного типа в рамках одного виртуального поля боя. В случае проведения войсковых учений реальное поле боя может дополняться виртуальными объектами, с использованием в программном обеспечении бронемашин технологии дополненной реальности.
Тренажёр экипажа танка Т-90

Тренажёр экипажа танка Т-72
Огромная популярность онлайн симуляторов боевой техники позволяет предположить, что обучающее программное обеспечение перспективной бронетехники, адаптированное для применения на обычных компьютерах, может быть использовано для предварительной подготовки в игровой форме будущих потенциальных военнослужащих. Разумеется, в таком ПО должны быть внесены изменения, обеспечивающие сокрытие сведений, составляющих государственную и военную тайну.
Применение симуляторов в качестве средства повышения привлекательности военной службы постепенно становиться популярным инструментом в вооружённых силах стран мира. По некоторым сведениям военно-морские силы США использовали компьютерную игру-симулятор морских сражений Harpoon для обучения офицеров флота ещё в конце XX века. С тех пор возможности по созданию реалистичного виртуального пространства выросли многократно, при этом применение современных боевых машин зачастую всё более становится похожим на компьютерную игру, особенно когда речь идёт о беспилотной (дистанционно управляемой) боевой технике.
Выводы
Экипажи перспективной бронетехники смогут принимать правильные решения в сложной, динамично меняющейся обстановке, и осуществлять их реализацию с существенно более высокой скоростью, чем это возможно в существующих боевых машинах. Этому будут способствовать унифицированные эргономичные рабочие места экипажа и применение интеллектуальных систем обработки и отображения информации. Использование бронетехники в качестве тренажёра позволит сэкономить финансовые средства на разработке и закупке специализированных обучающих средств, обеспечит всем экипажам возможность тренировки в любое время в виртуальном боевом пространстве или в ходе войсковых учений с использованием технологий дополненной реальности.
Можно предположить, что реализация вышеуказанных решений в части повышения ситуационной осведомлённости, оптимизации эргономики кабин экипажа и применение высокоскоростных приводов наведения позволят отказаться от одного из членов экипажа без потери боевой эффективности, например, можно совместить должность командира и наводчика. Однако на командира бронемашины могут быть возложены некоторые другие перспективные задачи, о которых мы поговорим в следующем материале.
- Автор:
- Андрей Митрофанов
- Использованы фотографии:
- otvaga2004.ru, airwar.ru, topwar.ru, npovk.ru, sfw.so
- Статьи из этой серии:
- Огневая поддержка танков, БМПТ «Терминатор» и цикл OODA Джона Бойда
Бронетехника против пехоты. Кто быстрее: танк или пехотинец?
Повышение ситуационной осведомлённости экипажей боевых бронированных машин
Свежие комментарии